 0
0  分享
分享
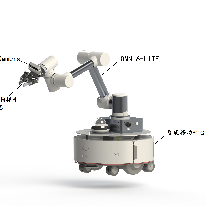
方案一:N1+ Xarm

该方案由EAI Smart高性能室内移动机器人平台+Xarm轻量协作机械臂+两指夹持器+激光雷达(实现导航,避障,路径规划) +IMU(导航时确定的姿态及运动的方向)+视觉传感器+高性能移动工作站(ROS 主站)+ROS 操作软件几个部分组成。
SMART室内智能移动机器人是 EAI最新研制的一款高标准、开放的ROS SLAM研究平台。其内置高性能 Slam 导航模块、高精度 G4 激光雷达;采用先进的动力悬挂装置,具备优异的平稳性和地面适应性;采用高标准的电气系统及结构设计,具备高级别的负载能力、越障能力、精确导航能力;采用开源ROS机器人操作系统、适合客户进行二次开发。
机械臂为Xarm 6自由度轻量协作机械臂。该机械臂将柔美的外观设计与全面的安全性设计融为一体,整机(带控制箱)仅重14kg,臂展最大为700mm,负载为5kg,最大末端速度达到1000mm/s,重复定位精度可达到0.1mm。在软件支持上则有Python/C++/ROS及图形化的编程模块。可进行位置、速度、力矩控制,产品API函数库对用户开放。XArm配置了两指夹持器,可完美进行移动抓取的研究和应用。
整体方案使用ROS(www.ros.org)开放式架构。ROS框架定义了一个组织良好的机器人软件系统结构,包括数百个用户提供的软件包和称为堆栈的软件包集合,实现功能如本地化和映射,规划,操作,感知等。这个特性简化了软件开发周期,并允许软件组件的轻松集成和重用,无论它们是视觉,SLAM,点云处理,掌握,规划,集群等中的设备驱动或最先进算法。
机器人的软件包括导航系统以及用于任务规划,提供定制化ROS系统及组件ROS驱动、完全配置的 MoveIt运动规划软件包、自主导航软件包、提供地图生成与定位软件。该套系统可以用于双臂交互及协作、移动抓取、遥操作机器人、服务机器人、移动仓储机器人等方面的研究和应用。
方案二:Smart alpha

Smart alpha 是EAI开发的新一代综合智能开发平台,产品外观设计精巧,系统配置丰富,整机部署快捷灵活,可实现远程自动巡航。Smart alpha具备自主导航功能,并可集成情景识别与深度学习算法,结合人物和物体识别摄像头,具备自动回充功能,是一款高效的一站式智能移动机器人开发平台系统。
系统由移动平台、智能协作机械臂、视觉控制器以及通信模组等部分组成。Smart alpha还可配备激光雷达、差分GPS模块、深度视觉、超声波和红外、六维力传感器等多种传感器模块。同时还可搭载高清云台变焦摄像头、全景摄像头和各种物联网设备等。


 粤公网安备 44030502004540号
粤公网安备 44030502004540号